

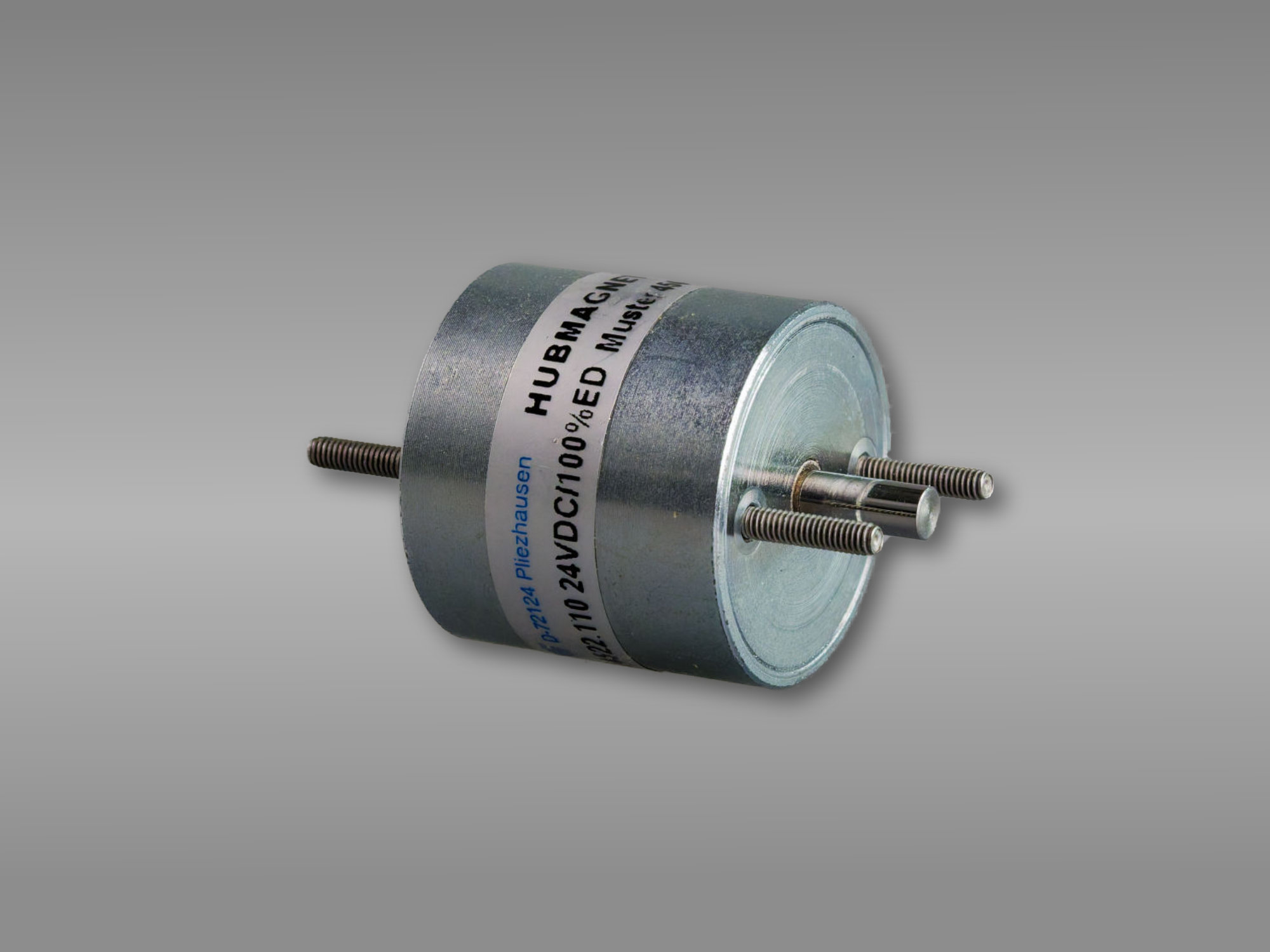
Reversible solenoids
When the coil is energized, the plunger performs a linear stroke movement. The maximum possible stroke depends on the magnet size and the shape of the plunger.
As a rule, the return of the plunger from the end position to the starting position must be achieved by an externally acting (spring) force. Special versions with an integrated return spring are partially available. The magnetic forces specified in the table are given without return force (spring). By using appropriate cooling (e.g., mounting on an aluminum plate for heat dissipation), approximately 30% to 50% higher values can be achieved.
indEAS develops customized solutions. Feel free to contact our team — we’ll be happy to help you find the right solution for your application. We are also glad to handle the control system and integrate our products into your overall concept.

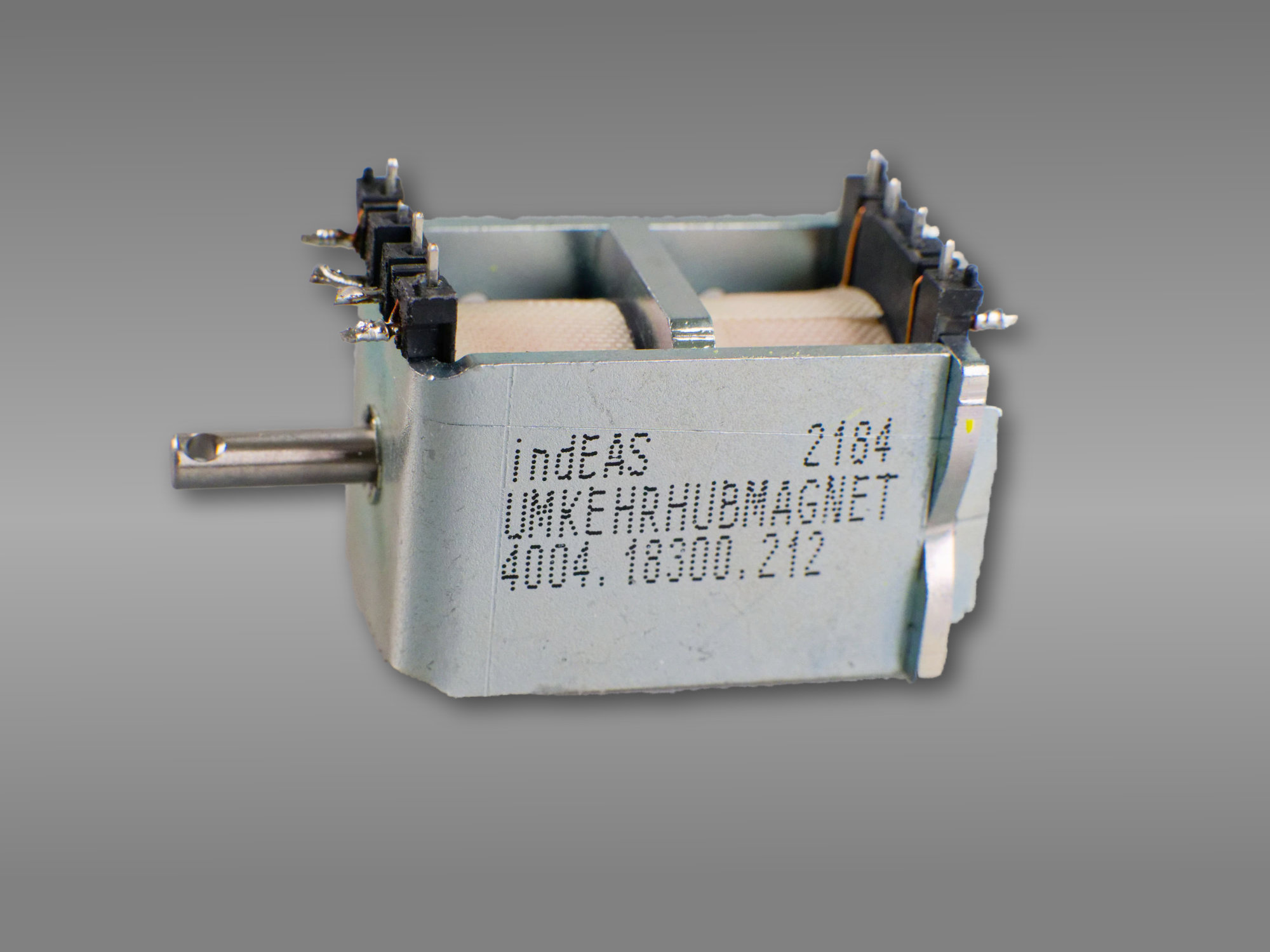
Solenoids / Linear Solenoids
When the coil is energized, the plunger performs a linear stroke movement. The initial position of the plunger must be determined during installation, while the end position is limited within the magnet itself.
The maximum possible stroke depends on the magnet size and the shape of the plunger. The force-displacement characteristic curve describes the force at every position throughout the stroke of the respective magnet. As a rule, the return of the plunger from the end position back to the starting position must be achieved by an externally acting (spring) force. Special versions with an integrated return spring are partially available. The magnetic forces specified in the tables are given without return force (spring). By using appropriate cooling (e.g., mounting on an aluminum plate for heat dissipation), approximately 30% to 50% higher values can be achieved.
indEAS develops customized solutions. Feel free to contact our team — we’ll be happy to help you find the right solution for your application. We are also glad to handle the control system and integrate our products into your overall concept.
Properties
- Pull and Push movements
- Easy to integrate
- Compact design
- High holding force
- Quick reaction time
- Long lifetime
- Mountable in any position
- Reduced weight
- Cost effectiveness
Exemplary Applications
- Locking systems
- Clamping systems
- Clutch systems
- Actuators
Exemplary sectors
- Robotics
- Automatization
- Material handling
- Medical technology
- Locking systems